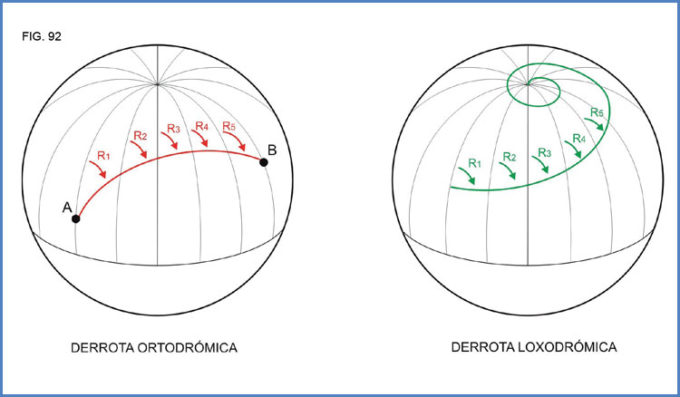
Viene de Conceptos de Ortodromia y Loxodromia (Clase 38)
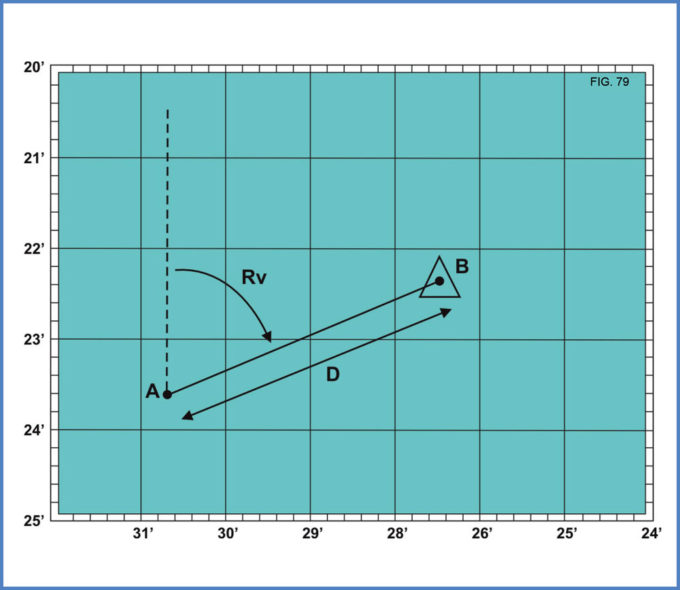
Como decíamos en el Capítulo V, utilizando una carta Mercator de una zona poco extensa, la determinación de la distancia a navegar puede resolverse fácilmente por el método gráfico. Esto es: uniendo los puntos de salida y de llegada con una línea y trasladando su medida con un compás de punta seca a la escala de las latitudes. Para la determinación del rumbo la cosa es aún más sencilla y puede hacerse utilizando el talco o las reglas paralelas.
Ahora bien, si lo que se pretende es determinar el rumbo y la distancia loxodrómica a navegar entre dos puntos lejanos, esto ya no puede resolverse gráficamente, dado que la carta necesaria debería representar una zona muy extensa y el resultado obtenido padecería de imprecisiones importantes. En tal caso, lo conveniente es recurrir a la trigonometría a través de formulaciones matemáticas sumamente sencillas. Por otra parte, es posible también arribar al mismo resultado mediante el uso de tablas que resuelven las fórmulas matemáticas antes mencionadas. Estas tablas se conocen como “Tablas de Estima”. Analizaremos el tema en la representación de la figura No 93:
Supongamos que se desea navegar desde el punto 1, cuyas coordenadas son j1 (latitud) y w1 (longitud), hacia el punto 2, con coordenadas j2 y w2. Como puede apreciarse, queda conformado un triángulo rectángulo con los siguientes elementos:
• El ángulo “R” es el rumbo verdadero a seguir.
• “D” es la distancia que separa ambos puntos.
• “Dj” es la distancia recorrida por la embarcación en sentido Norte-Sur. Dado que la escala de distancias expresada en millas náuticas es equivalente a la escala de las latitudes (1 milla náutica = 1’ latitud), podemos decir que “Dj” es la diferencia en latitud entre el punto de salida (1) y el de llegada (2).
• “A” es el apartamiento entre ambos puntos, o lo que es igual a decir que es la distancia recorrida en sentido Este-Oeste. En este caso, el valor del “apartamiento” no es igual a la diferencia en longitud (Dw), dado que ambas escalas no guardan proporcionalidad.
Como sabemos, producto de la proyección cilíndrica, 1o de latitud es igual a 1o de longitud sólo en el Ecuador, tema ya abordado en el Capítulo II. A medida que se navega en latitudes superiores, ambas escalas guardan una relación que, aunque no es exacta, podría expresarse como:
Dw = A / cos jm O bien:
A = Dw x cos jm
Donde jm es la latitud media de la zona. Para obtener jm debe procederse promediando las latitudes de llegada y de salida. En el caso planteado en el esquema anterior, la latitud media se calculará de la siguiente manera:
jm = (j1 + j2) / 2
La fórmula ”Dw = A / cos jm“ expresa simplemente la relación que guardan la escala de las longitudes y la de las latitudes, en función de la latitud media de la zona. Como decíamos anteriormente, dicha fórmula no es exacta por varias razones. La primera es que la misma representa las proporcionalidades que tendrían ambas escalas en una proyección cilíndrica pura para una Tierra esférica, mientras que las cartas que utilizamos a diario se construyen en base a proyecciones cilíndricas modificadas, como son las mercatorianas. Estas últimas incluyen los factores de corrección para el elipsoide. El otro motivo por el cual la expresión anterior no resulta exacta, se debe al hecho de utilizar a la latitud media para establecer las diferencias entre las escalas de latitud y longitud. Esta distorsión, si bien es despreciable en cartas con poca variación de latitud, comienza a ser considerable cuando las cartas utilizadas contienen grandes extensiones, y las variaciones entre la latitud máxima y la mínima son amplias.
A los efectos de subsanar estas inexactitudes existen tablas que permiten su corrección, tal es el caso de una tabla llamada “(1) CORRECCIÓN ADITIVA A LA LATITUD MEDIA jm PARA HACER EXACTA LA FÓRMULA A = Dw x cos jm“.
En realidad, y a los efectos de los cálculos náuticos empleados de manera corriente, dicha corrección no es necesaria y la fórmula anterior resulta perfectamente válida.
Ahora bien, del triángulo rectángulo conformado en la figura No 93, aplicando la trigonometría plana, pueden extraerse algunas fórmulas matemáticas que serán de suma utilidad para resolver la estima de manera sencilla:
1. Dj = D x cos R 2. A = D x sen R 3. tg R = A / Dj
Las fórmulas aquí expresadas y sus variantes, permiten determinar muy fácilmente la nueva posición que tendrá una embarcación a partir de la distancia recorrida y del rumbo navegado. También permiten resolver el problema inverso. Es decir: dadas las coordenadas de salida y de llegada, calcular la distancia que separa ambos puntos y el rumbo al que se deberá navegar.
Para el primer caso (estima directa), aplicando las fórmulas 1 y 2 y teniendo los datos del rumbo (R) y de la distancia (D), se calculan los valores de Dj y apartamiento. A partir de este último, se calcula el valor de Dw utilizando como dato la latitud media a través de la fórmula “Dw = A / cos jm”. Una vez obtenidos dichos valores, se determinan las nuevas coordenadas que tendría la embarcación, simplemente sumándolos o restándolos a las coordenadas del punto de partida. Para la segunda opción (estima inversa), con las coordenadas de salida y de llegada se obtienen en primer lugar los valores de Dj y Dw y se convierte este último dato en apartamiento (A = Dw x cos jm). Habiendo calculado ya este último y con el dato obtenido del Dj, se puede determinar el rumbo a navegar aplicando la fórmula 3 (tg R = A / Dj). Hecho esto, solo resta reemplazar el valor del rumbo en cualquiera de las fórmulas 1 ó 2 y determinar así la distancia a recorrer.
Para clarificar un tanto las cosas, veremos un ejemplo de cada caso:
Ejercicio estima directa:
• Habiendo zarpado desde j1= 32o 44,6’ S y w1= 32o 17,6’ E, y luego de haber recorrido una distancia de 282 millas náuticas a rumbo verdadero 68o. ¿Cuáles serán las coordenadas del punto de llegada?
Calculamos en primer lugar Dj (para no complicar el cálculo en adelante redondearemos las fracciones de minuto a un solo dígito):
Dj = D x cos R Dj = 282’ x cos 68o Dj = 282’ x 0,374606 Dj = 105,6388’ = 1o 45,6’
Continuamos averiguando el apartamiento:
A = D x sen R A = 282’ x sen 68o A = 282’ x 0,927183 A = 261,4656’ = 4o 21,4’
Lo que sigue es convertir el apartamiento en Dw:
Dw = A / cos jm Dw = 4o 21,4’ / cos 33o (redondeamos
a 33o la latitud media)
Dw = 4o 21,4’ / 0,838670 Dw = 5o 11,7’
Habiendo obtenido los valores de Dj y de Dw, lo que resta es sumarlos o restarlos a los valores de las coordenadas de salida según corresponda:
j2 = j1 – Dj (nos encontramos en latitud sur y navegamos con componente norte, por lo tanto deberemos restar la diferencia de latitud)
j2 = 32o 44,6’ – 1o 45,6’
j2 = 30o 59,0’ S Hemos obtenido la latitud del punto de
arribo, haremos lo propio con la longitud:
w2 = w1 + Dw (nos encontramos en longitud este y navegamos con componente este, por lo tanto deberemos sumar la diferencia de longitud)
w2 = 32o 17,6’ + 5o 11,7’
w2 = 37o 29,3’ E
De este modo se han obtenido las coordenadas del punto de llegada a partir de la estima analítica por el método directo. Para concluir el tema, presentaremos un ejercicio por el método inverso.
Ejercicio estima inversa:
• Determinar el rumbo verdadero que se deberá seguir y la distancia a recorrer para navegar desde el puerto de Montevideo, cuyas coordenadas aproximadas son j = 34o 54,5’ S y w = 56o 7,6’ W, hasta Ciudad del Cabo, con coordenadas j = 33o 20,3’ S y w = 18o 25,6’ E.
En primer lugar determinaremos la diferencia en latitud Dj:
Dj = j1 – j2 Dj = 34o 54,5’ – 33o 20,3’
Dj = 1o 34,2’
El segundo paso será determinar el apartamiento, para lo cual será necesario obtener primero el valor de la diferencia en longitud Dw. Téngase en cuenta que en este caso deberán sumarse, ya que una posición se encuentra al Oeste y la otra al Este de Greenwich:
Dw = w1 + w2 Dw = 56o 7,6’ + 18o 25,6’ Dw = 74o 33,2’
El paso siguiente es, a partir de la latitud media de la zona (jm), calcular el valor del apartamiento. En este caso, y dado que la diferencia en latitud es muy poca, utilizaremos un valor de jm de 34o, interpolando aproximadamente. Aplicando la fórmula:
A = Dw x cos jm A = 74o 33,2’ x cos 34o A = 61o 48, 4’ = 3.708,4 Mn
El resultado del apartamiento obtenido en el paso anterior está expresando simplemente que una latitud media de 34o, 74o 33,2’ en la escala de las longitudes equivale en distancia a 61o 48,4’ en la escala de las latitudes, o lo que es lo mismo: 3.708,4 millas náuticas.
Para averiguar el rumbo a seguir aplicaremos la fórmula de la tangente:
tg R = A / Dj
tg R = 61o 48, 4’ / 1o 34,2’ tg R = 39o 22’
Continua en: Tablas de Estima: El problema directo (Clase 40)
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!