Viene de: Situación por mediciones sucesivas (Clase 53)
Buscando la palabra “faro” en el diccionario más popular de la web se puede encontrar la siguiente definición: “Un faro es una torre situada cerca de la costa o junto a ella que se ubica en los lugares donde transcurren las rutas de navegación de los barcos y que dispone en su parte superior de una lámpara potente, cuya luz se utiliza como guía”. Viéndolo desde un aspecto netamente técnico, podríamos definirlo como un punto notable de la costa que permite obtener la situación de una embarcación a partir de determinados procedimientos. Tiene también un costado romántico, toda vez que el solo hecho de mencionar la palabra faro nos remite a puertos lejanos, tristes despedidas o alegres reencuentros. Un faro en la oscuridad de la noche produce al navegante sensaciones únicas, y esto lo saben bien los que alguna vez, en aquellas noches que el tiempo no acompaña, han visto aparecer su luz como un augurio de cena caliente y sueño reparador. Un faro es también, en muchos casos, una reliquia plagada de historia.
Un poco de historia
A partir de que los primeros navegantes empezaron a hacerse a la mar, inmediatamente comenzaron a idear medios para orientarse a lo largo de las costas, con el objetivo principal de regresar al puerto de origen sin dificultades. Los primeros intentos de crear algo que sirviera a tal efecto, sobre todo durante la noche, llevaron a aquellas civilizaciones a encender fogatas en lugares elevados o bien en torres construidas para tal fin. Nacen de este modo los faros primitivos.
La palabra “faro” tiene su origen a partir del célebre Faro de Alejandría, torre construida en Egipto durante el reinado de Ptolomeo II por el arquitecto Sostrato de Cnidos (siglo III a.C) frente al puerto de Alejandría, y que servía para señalizar su posición al navegante. Esta torre de 180 metros de altura se encontraba erigida sobre la Isla de Faros, de ahí su nombre. Según se sabe, el faro de Alejandría estaba íntegramente construido en mármol blanco y su luz iluminaba el mar hasta una distancia de 55 kilómetros (300 estadios de la época), utilizando un sistema de espejos que reflejaba la luz del Sol durante el día y el fuego que se encendía durante las noches. El faro de Alejandría, considerado por los antiguos como una de las maravillas del mundo, sorprendía a quienes lo admiraban por su increíble construcción y su considerable altura. Se supone que su base tenía forma cúbica, su parte media era octogonal y su parte superior cónica. Se cree que cerca del 700 d.C. sufrió el derrumbe de su parte más alta, y completó su destrucción total un violento terremoto acaecido en el siglo XIV de nuestra era.
Otro de los faros célebres, también considerado como una de las maravillas del mundo, fue el Coloso de Rodas. Se trataba de una gigantesca estatua de bronce de más de 33 metros de altura, que representaba al dios del Sol (Helios) y que servía de referencia a los navegantes de toda Grecia. Erigido en el 281 a.C., sólo duró de pie apenas 57 años ya que, al igual que ocurrió con el Faro de Alejandría, un terremoto ocasionó su ruina en el 224 a.C. Según siempre se dijo, la colosal estatua se hallaba ubicada con un pie en cada uno de los murallones de ingreso al puerto de Rodas, pero dicha hipótesis no sería del todo cierta.
Digna de mención es también la Torre de Hércules, construida por los romanos en el siglo I d.C. y situada en el puerto de La Coruña. Con una altura de 68 metros, tiene la particularidad de ser el único faro romano y el más antiguo del mundo que se encuentra en funcionamiento.
Las cuestiones inherentes a la iluminación no avanzaron significativamente hasta el siglo XIX, donde las hogueras utilizadas hasta entonces fueron paulatinamente reemplazadas por el alumbrado con aceites combustibles tanto vegetales como minerales, en algunos faros franceses. A partir de allí comenzaron a proveerse a las torres de iluminación de sistemas ópticos con el objeto de mejorar su rendimiento. Tal era el caso de las lámparas “Maris”, muy utilizadas por entonces. Asimismo, comenzaron a diseñarse los mecanismos destinados a provocar las ocultaciones de la luz, con el objetivo de dotar a cada faro de sus propios destellos característicos.
En el año 1822 se introdujo el sistema “dióptrico”, mediante el cual los rayos directos eran enviados al mar a través de lentes esféricas rodeadas de prismas. Posteriormente, Thomas Stevenson diseñó un dispositivo que utilizaba una lente por delante de un reflector, dando como resultado una luz llamada “catadióptrica”, que era resultante de la sumatoria de los rayos directos y los reflejados.
Los sistemas de iluminación modernos constan de tres partes: el sistema lumínico, cuya función es la de generar la luz emitida; el sistema óptico, responsable de concentrar y aumentar el haz de luz emitido por el sistema lumínico; y el dispositivo mecánico destinado a proveer las características de los destellos del faro. Los sistemas lumínicos utilizados hasta la evolución de la electricidad empleaban lámparas de incandescencia por vapor de petróleo. En la actualidad, la gran mayoría de los faros utiliza lámparas eléctricas, salvo aquellos que se encuentran emplazados en rocas o islotes carentes de suministro eléctrico.
Los faros modernos cuentan además con dispositivos que reemplazan la lámpara de manera automática si esta sufriese alguna avería. En cuanto a su construcción, la evolución de los faros ha seguido básicamente a la de la construcción en general. Antiguamente eran de mampostería o madera en su gran mayoría, viéndose luego reemplazados por el hierro y el hormigón armado, ya más cerca de nuestro siglo.
Características de los faros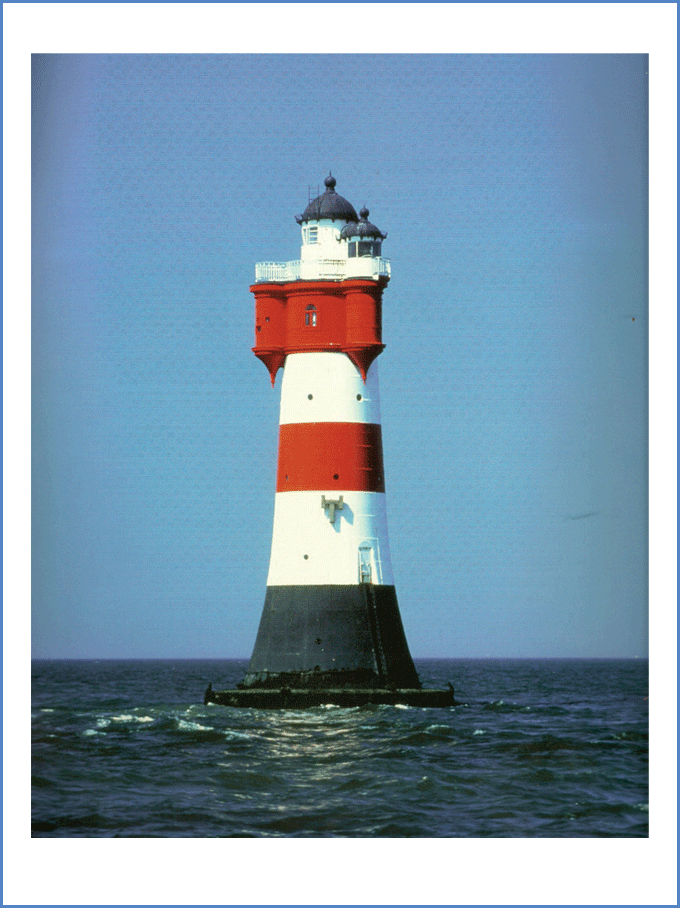
Los faros cuentan con determinadas características que los diferencian de otros, a los efectos de permitir al navegante su fácil identificación. En tal sentido, las luces que emiten pueden ser fijas o intermitentes.
En el caso de luces intermitentes, será el tipo de destello el que permita su diferenciación, pudiendo clasificarlos en dos grandes grupos: luz de destellos (destellante) o luz de ocultaciones (ocultación). El primer caso se da cuando la duración de la luz es menor que la duración de la oscuridad. Para explicarlo sencillamente, podríamos decir que la luz se encuentra mayormente apagada y de repente aparecen uno o más destellos breves.
En la luz de ocultación se da el caso inverso, es decir que el intervalo de luz es mayor que el del eclipse. Es decir que la luz se vería siempre encendida, eclipsándose la misma una o varias veces con intervalos cortos.
En ambos casos, tanto los destellos como las ocultaciones pueden ser uno solo o varios seguidos, conformando un grupo de estos. De este modo podemos definir a la luz de un faro como por ejemplo: grupo de tres destellos (eclipse permanente y luego tres destellos cortos), grupo de dos ocultaciones (luz permanente y luego dos ocultaciones cortas), etc.
Existen algunos casos denominados “centellantes” que se caracterizan porque el período de luz y el de eclipse son iguales y muy pequeños, es decir que encienden y apagan su luz rápidamente y de manera permanente.
Es también común encontrar algunas combinaciones entre grupos de varios destellos y luz fija, por ejemplo: grupo de 4 destellos y fija (cuatro destellos cortos, luego eclipse, luego destello largo seguido de eclipse largo, y de nuevo el ciclo completo).
El intervalo de tiempo al cabo del cual una luz intermitente vuelve a tomar el mismo aspecto en el orden establecido se denomina “período”. Es decir que el período de una luz es el tiempo en que se cumple un ciclo completo, por ejemplo 10, 15 o 20 segundos, según sea el caso. Tomemos por caso una luz que destella tres veces en 6 segundos y luego se apaga durante 9 segundos, al cabo de los cuales comienza nuevamente el ciclo. En las publicaciones náuticas donde figure dicha característica (carta náutica, faros y señales, derrotero, etc.) probablemente aparezca la leyenda “B Des (3) c/15 s”.
“B” Indica el color de la luz (en este caso y en la mayoría de los faros: blanca).
“Des (3)” indica la cantidad de destellos.
“c/15 s” expresa el período, 15 segundos (6 de destellos y 9 de eclipse).
En muchas publicaciones aparece una advertencia respecto de los intervalos de los destellos, ya que en la práctica estos tiempos pueden variar, bien sea debido a desgastes en los mecanismos o bien porque a grandes distancias la duración de los destellos puede parecer menor. Este efecto se
agrava si existiese bruma o neblina. Esta última puede llegar a provocar, en algunos casos, que la luz blanca adquiera un tono rojizo que pueda confundir al navegante.
Otra característica de los faros, no menos importante, es el “alcance”. El alcance se clasifica en dos: alcance lumínico y alcance geográfico.
El alcance lumínico o luminoso expresa la distancia desde donde puede verse la luz que emite un faro en circunstancias óptimas, independientemente de la esfericidad terrestre y de las condiciones meteorológicas reinantes al momento de la observación. Para su determinación se considera nula dicha esfericidad y se establecen condiciones atmosféricas medias. Si un faro tiene un alcance lumínico de 20 millas náuticas, debería verse desde esa distancia si las condiciones meteorológicas son buenas y el observador se halla con una elevación de ojo tal que el tope del faro no quede oculto por debajo del horizonte. El alcance geográfico es la distancia desde la que puede verse la luz que emite la linterna de un faro respecto de la línea de su horizonte.
El concepto que se utiliza en las publicaciones náuticas en nuestro país es el del “alcance nominal”, que indica la distancia desde la que puede observarse la luz de un faro determinado desde una elevación de ojo de 5 metros.
Continua en: Las Mareas: Fundamentos teóricos (Clase 55)
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!