Viene de Definiciones de tiempo (Clase 32)
Hasta aquí hemos visto la forma de medir y tabular las horas y fracción de un determinado día del año y su relación con la posición del Sol medio sobre la esfera celeste. Pero como todos sabemos, las diferencias en los horarios de los distintos países generan a su vez diferencias de fechas entre estos.
Si se quiere, y con el objeto de ordenar la vida a bordo (establecer horarios de almuerzos y cenas, guardias, etc.), puede llevarse un reloj adicional e ir ajustándolo a las horas de los husos respectivos. De este modo se evitarían las molestias de almorzar en horarios distintos a los acostumbrados (por ejemplo al atardecer), o bien de dormir con la luz del día. La notación utilizada para referirse a la Hora Bitácora es “Hb”.
Para pasar de Hora bitácora a Hora de Greenwich la expresión que se utiliza es la misma que vimos con anterioridad, ya que la Hora Bitácora no es otra cosa que la Hora Legal del huso.
HmI = Hb + ( +/- H huso)
Hemos visto que el día comienza cuando el Sol medio atraviesa el meridiano inferior (antemeridiano) de un observador. Supongamos, a los efectos de mejorar la comprensión, a una persona ubicada en determinada Longitud y al Sol medio atravesando su antemeridiano. Para esta persona comienza un nuevo día y su reloj debería marcar las 0:00 hs. de la fecha que comienza. Ahora bien, para todos aquellos que se encuentren al Este de su Longitud, el nuevo día ya habrá comenzado algunos minutos antes debido a que el Sol habrá pasado por allí con anterioridad. Por el contrario, aquellos observadores que se encuentren al Oeste de este último, conservarán todavía la fecha del día anterior ya que el Sol no ha pasado aún.
Esto quiere decir que salvo en el caso visto en el apartado anterior (cuando en Greenwich son las 12:00 hs.), siempre coexistirán dos fechas distintas en nuestro Planeta.



Analicemos esto detenidamente:
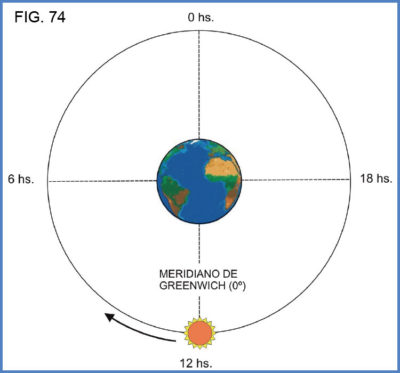
• Veamos el caso anterior representado en la figura No 74: El Sol medio ubicado sobre el primer meridiano, para el cual los relojes marcarán las 12:00 hs., mientras que en el meridiano inferior serán las 00:00 hs. Sólo en este instante todo el globo acusará la misma fecha.
• A partir del segundo siguiente, el movimiento del Sol provocará el cambio de fecha para aquellos observadores ubicados al Oeste del antemeridiano de Greenwich. Como puede apreciarse, a medida que el Sol avanza va generando un sector del Planeta para el cual la fecha cuenta con un día más. Cuando el Sol medio alcance el meridiano 90o W (Fig. 75), un cuarto del Planeta tendrá fecha posterior mientras que el resto conservará la fecha de Greenwich. En ese instante, en el primer meridiano serán las 18:00 hs.
• Seis horas más tarde (Fig. 76) el Sol alcanzará el meridiano del cambio de fecha (meridiano inferior de Greenwich). Justo en ese momento, la mitad exacta de la Tierra tendrá la fecha de Greenwich y la otra mitad contará con un día más. Nótese que a partir de este instante cambiará la fecha del meridiano de Greenwich, incrementándose en un día.
• Cuando el Sol medio se ubique sobre el meridiano de 90o E (Fig. 77), en Greenwich ya habrán pasado 6 horas del cambio de fecha. Por lo tanto solo un cuarto del Planeta conservará la fecha anterior a la de Greenwich.
• El ciclo concluye cuando el Sol medio ha completado una vuelta al pasar nuevamente por Greenwich (ver nuevamente Fig. 74). En ese instante todo el Planeta contará ya con la nueva fecha.
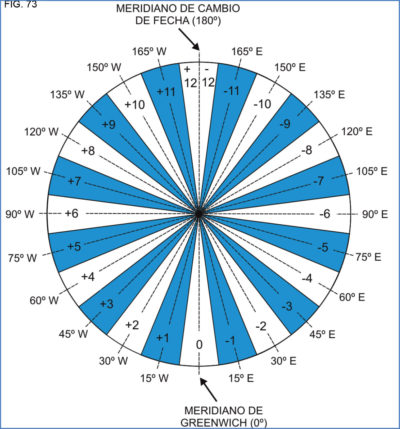
Si se observa con atención el gráfico de los husos horarios (Fig. 73), así como también analizando los esquemas de la explicación anterior, surge una interesante conclusión: El antemeridiano de Greenwich separa dos zonas que cuentan con horas iguales pero con fechas diferentes.
Para comprenderlo mejor, hagamos el siguiente análisis (Fig. 78): Supongamos a dos barcos que zarpan a la misma hora y a igual velocidad desde el meridiano de Greenwich: el barco “A” con rumbo 90o (Este) y el barco “B” con rumbo 270o (Oeste). Supongamos también, para simplificar las cosas, que el Sol medio permanece inmóvil (el tiempo no transcurre) mientras que ambos barcos van avanzando por el Ecuador con rumbos opuestos.
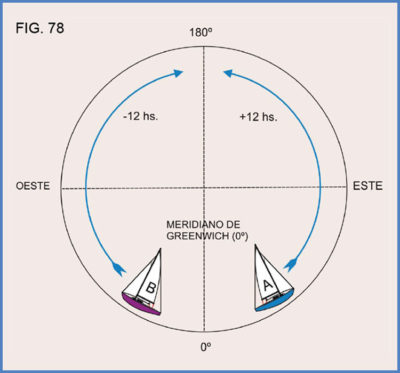
El barco “A”, a medida que atraviesa los diferentes husos horarios en su rumbo hacia el Este, irá aumentando su hora en el reloj de bitácora; mientras que el barco “B”, navegando al Oeste, procederá disminuyendo su hora.
Cuando ambos barcos se encuentren en el meridiano de 180o (Este u Oeste), el barco “A” habrá incrementado su reloj en 12 horas, mientras que el barco “B” habrá quitado 12 horas a su reloj. La conclusión es que ambos barcos, al encontrarse en el antemeridiano, contarán con la misma hora de bitácora pero de fecha diferente debido a que entre ambos relojes habrá 24 horas de diferencia. La fecha del barco “A”, al sumar horas a su reloj, contará un día más que la del barco “B” que fue sustrayendo horas al suyo.
Si volvemos al esquema de los husos horarios (Fig. 73), comprobaremos que existe una franja de 7,5o a ambos lados del meridiano de cambio de fecha (180o): huso +12 y huso -12. Todos los habitantes de ambas franjas utilizarán el mismo huso horario (12), con la salvedad de que aquellos que se encuentran al Este de dicho meridiano (longitudes Oeste) utilizarán el huso +12 y, en cambio, los que están al Oeste del mismo (longitudes Este) emplearán el huso -12. Como ya dijimos, ambos tendrán la misma hora pero con un día de diferencia.
Para salvar esta complejidad, el barco que navegando al Este (rumbo 90o) atraviese el antemeridiano de Greenwich (pasando de longitudes Este a longitudes Oeste), deberá disminuir un día en su calendario. Es decir que tendrá que contar dos veces la misma fecha. Por el contrario, aquel que lo haga pasando de Oeste a Este (rumbo 270o), sumará un día a su fecha y por ende arrancará una hoja a su calendario.
En ninguno de los casos anteriores debe ajustarse el reloj. Si un barco completa una vuelta alrededor de la esfera navegando hacia el Este y no repite un día al atravesar el meridiano de cambio de fecha, al regresar a su puerto de origen comprobará que su calendario contará un día más que la fecha del puerto en cuestión. Esto no implica que los tripulantes hayan vivido un día de más, sino tan sólo que han omitido restar las 24 horas que incrementaron en su reloj al dar la vuelta.
Continua en: El reloj de Bitácora y la conservación del tiempo (Clase 34)
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!