Viene de: Situación por dos o más Líneas de Posición (Clase 52)
Situación por Mediciones Sucesivas
Este caso se presenta cuando no puede obtenerse más de una línea de posición por vez, tanto sea demora, distancia o cualquiera de las líneas de posición conocidas. El modo de resolverlo requiere de algún cálculo adicional, en el que además interviene la navegación por estima, y su resolución dependerá de cada caso en particular. Las variantes posibles son las siguientes:
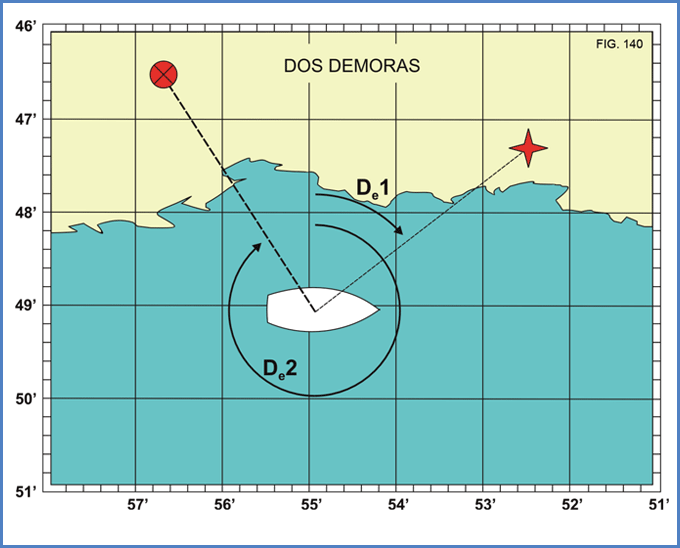
Situación por demoras sucesivas a un mismo punto notable Este es el caso en el que se cuenta con un solo punto notable. El método para resolverlo consiste en el traslado de la primera línea de posición, a la hora de la segunda, a fin de intersectarlas entre sí. El procedimiento completo es el que sigue:
1) Se toma una demora el punto notable en cuestión y se traza en la carta, anotando la hora de la medición.
2) Un cierto tiempo después se toma una nueva demora al mismo punto y se traza esta última junto con su correspondiente hora.
3) Utilizando los principios de navegación por estima vistos anteriormente, se traslada la primera recta al horario de la segunda, tal como si se tratase de un punto, solo que esta vez se trata de una recta (una sucesión de puntos). Para ello, en primer lugar debe calcularse la “Derrota Verdadera” seguida entre ambas posiciones, observando todas las variables que intervienen (rumbo de compás, desvío, declinación magnética, abatimiento y efecto de la corriente). Posteriormente se determina la distancia recorrida teniendo en cuenta el tiempo transcurrido entre ambas mediciones y la velocidad de corredera. Una vez hecho esto, se toma un punto cualquiera de la primera línea de posición (el punto notable es una buena opción) y se traslada por estima a la hora de la segunda. Allí se coloca un nuevo punto. Lo que resta es trazar una línea paralela a la primera recta, que pase por este último punto. Esta será la recta trasladada. Donde esta última intersecte a la segunda demora trazada, tendremos el punto FIX.
Ejemplo:
• A hora bitácora 10:15 se obtiene una Demora Verdadera a un punto notable de 47o. A partir de allí se continúa navegando con un rumbo de compás de 78o, con un desvío de compás para ese rumbo de +3o, en una zona con una declinación magnética de 5o W, a una velocidad de propulsión de 4,9 Nd, estimando un abatimiento a estribor de 10o, y una corriente de 1 Nd. de intensidad y 120o de dirección. A hora bitácora 12:30 se obtiene una nueva Demora Verdadera al mismo punto de 345o.
Determinar la posición del buque:
En primer lugar trazamos la Demora obtenida a las 10:15 horas. Téngase en cuenta que el problema planteado ya nos da el dato de la Demora Verdadera. No debe olvidarse la corrección por declinación magnética si la demora se hubiese obtenido con un compás de mano. De haber sido medida con el compás de bitácora de la embarcación, debe incluirse en la corrección el desvío de compás correspondiente. Una vez hecho esto, trazamos la demora de las 12:30 horas (Fig. 145).
Calculamos ahora el rumbo verdadero:
Rv = Rc + Dc + dm + a Rv = 78o + (+3o) + (-5o) + (+10o) Rv = 78° + 3° – 5o + 10° Rv = 86o
Aplicamos el triángulo de deriva a efectos de determinar la derrota verdadera y la velocidad efectiva (Fig. 144).
Del gráfico se obtiene que:
Dv = 93o Ve = 5,7 Nd.
Calcularemos entonces el tiempo de navegación y la distancia recorrida entre ambas demoras:
Tiempo de navegación = Hb2 – Hb1 Tiempodenavegación=12h30m-10h15m Tiempo de navegación = 135 minutos Entonces:
D = V xT
D = 5,7 Mn/60m x 135 m
D = 12,8 Mn
Trasladamos ahora el punto notable sobre la carta con los valores de la derrota verdadera y la distancia obtenidos, graficando allí un nuevo punto (Fig. 145).
Para finalizar, trazamos una paralela a la recta de las 10:15, que pase por el punto recientemente trasladado. Donde dicha recta intersecta a la demora de las 12:30, situamos nuestro punto FIX.
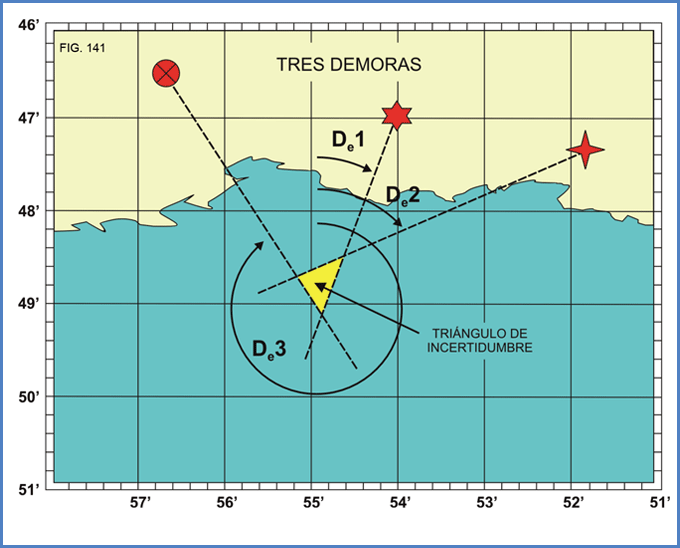
Situación por demoras no simultáneas a dos puntos notables Este caso es similar al anterior en cuanto al procedimiento, y se da en aquellas ocasiones en que dos puntos notables se encuentran tan alejados entre sí que no permiten efectuar el procedimiento de las demoras simultáneas. El método de resolución es el siguiente:
1) Cuando la embarcación comienza a alejarse del primer punto notable, se toma una última demora a dicho punto y se traza en la carta.
2) Se continúa la navegación hasta que el siguiente punto notable se hace visible, de forma tal que permita tomar una demora confiable y con un ángulo de corte adecuado con la recta anterior. En ese instante se efectúa la medición de la nueva demora y se grafica en la carta náutica.
3) Se traslada la primera línea de posición al horario de la segunda, utilizando el mismo método que en el caso anterior.
Ejemplo:
• A hora bitácora 15:25 se obtiene una Demora Verdadera a un punto notable de la costa de 42o. A partir de allí se continúa navegando cumpliendo con una derrota verdadera de 282o, hasta que a hora bitácora 16:40 se obtiene una nueva Demora Verdadera al siguiente punto notable de 338o. La distancia recorrida entre ambas Demoras es de 8,9 Mn. Determinar la posición del buque:
En primer término trazamos la Demora correspondiente a las 15:25 (Fig. 146). Acto seguido se grafica la segunda Demora (de las 16:40). Una vez hecho esto, trasladamos el primer punto notable una distancia de 8,9 Mn, a la derrota verdadera 282o.
Luego trazamos una línea paralela a la Demora de las 15:25 que pase por el punto
trasladado. Donde dicha línea corte a la Demora de las 16:40, graficamos la posición FIX.
En cualquiera de los dos procedimientos, ya sea con líneas de posición “sucesivas” o “no simultáneas”, pueden utilizarse tanto sea demoras, como enfilaciones o distancias, siempre y cuando se respete el procedimiento de trasladar la primera línea de posición, por estima, hasta el instante de la segunda observación.
En el caso de las distancias, debe tenerse en cuanta que esta es una circunferencia, cuyo centro es el punto notable y su radio igual a la distancia medida. Para proceder a trasladar una “Distancia” debe trasladarse en primer término el punto notable (igual que los casos anteriores) y luego trazar la circunferencia con el mismo radio, con centro en el nuevo punto trasladado.
Ejemplo:
• A hora bitácora 20:22 se obtiene una distancia a un faro de 7,5 Mn. A partir de allí se prosigue navegando con una derrota verdadera de 105o, hasta que a hora bitácora 22:16 se determina una segunda distancia a un nuevo faro de 6,2 Mn. Se establece que la distancia recorrida entre ambas mediciones es de 10,4 Mn.
Comenzamos graficando la línea de posición de las 20:22, haciendo centro en el punto notable correspondiente y trazando una circunferencia de 7,5 Mn, con centro en el mencionado punto (Fig. 147). Posteriormente hacemos lo propio con la circunferencia de las 22:16 (6,2 Mn.), respecto del segundo punto notable.
Para finalizar, se traslada el primer punto notable una distancia igual a 10,4 Mn, a la derrota verdadera 105o. Con centro en este último punto trazamos una circunferencia de 7,5 Mn. de radio, que será la Distancia trasladada. Donde esta se intersecta con la circunferencia de las 22:16, tendremos nuestra posición FIX.
Situación por duplicación de la marcación a un mismo punto notable Este método es, en realidad, una condición particular del método de las demoras sucesivas. Para explicarlo se debe recurrir a un principio de la geometría que expresa que el ángulo exterior de un triángulo es igual a la suma de los otros dos ángulos interiores, no adyacentes. Para el caso concreto de un triángulo isósceles (dos lados iguales): los ángulos opuestos a los lados iguales, también lo serán.
A partir de este postulado, el método de la duplicación de la marcación consiste en lo siguiente: se toma una marcación a un determinado punto notable, de manera tal que esta sea menor a 90o, y posteriormente se toma una nueva marcación al mismo punto cuando el valor de la marcación primera ha duplicado su valor. La distancia de la embarcación al punto notable es igual a la distancia navegada entre ambas marcaciones.
Como puede apreciarse en el esquema de la figura 148, entre la posición de la embarcación al momento de la primera marcación (“A”), la posición durante la segunda marcación tomada (“B”) y el punto notable (“C”) se forma un triángulo isósceles. Los lados iguales de dicho triángulo son el lado “AB” (distancia recorrida por la embarcación) y el lado “BC” (distancia al objeto notable), mientras que son iguales el ángulo con vértice en “A” y el del vértice “C”.
El procedimiento para determinar la distancia a un faro por este método es relativamente sencillo:
1) A una hora determinada se toma una “marcación” respecto de un punto notable. Téngase en cuenta que para obtener dicha marcación es preciso efectuar la medición de la correspondiente “demora” en primer término, y luego efectuar la suma o diferencia respecto del valor del rumbo, según corresponda en cada caso.
2) Navegando a un rumbo constante (muy importante) se toman marcaciones a intervalos regulares hasta que se obtenga una cuyo valor sea exactamente el doble de la marcación inicial. En ese instante se toma nota de la hora.
3) Con los datos de la velocidad de propulsión y las horas de cada medición, se calcula la distancia recorrida entre ambas marcaciones.
4) La distancia obtenida equivale a la distancia que guarda la embarcación respecto del punto notable.
Errores en el trazado de Líneas de Posición
Los errores más comunes del método se deben fundamentalmente a la mala elección de los ángulos de corte cuando se combinan diferentes líneas de posición. Una consideración importante a tal efecto reside en la elección de aquellos puntos notables cuyas demoras resultantes sean las adecuadas, a fin de que se intersecten con los ángulos más convenientes.
En el gráfico de la figura No 149 se ha representado a dos rectas (R1 y R2), que se intersectan entre sí con un ángulo de 90o. Suponiendo un error de cálculo en ambas de 2’ en más o en menos, se forma alrededor de cada recta una “faja de incertidumbre” de 4 millas náuticas de ancho. En la figura puede apreciarse claramente que, de la intersección de ambas fajas, surge una zona de incertidumbre cuya forma es un cuadrado de 4 millas por lado.

Si, por el contrario, hubiésemos elegido objetos de la costa cuya separación entre sus respectivas demoras fuese muy pequeña (20 a 30o), o bien muy grande (150o a 160o), la zona de incertidumbre se vería incrementada enormemente, pasando de ser un cuadrado a convertirse en un rombo de enormes dimensiones como el que se representa en la figura No 150. De más está decir que esto no es lo correcto a fin de obtener una buena situación.
Queda demostrado que, en cualquier caso, la mejor condición para minimizar los errores se da con dos demoras cuya diferencia angular sea cercana a 90o.
Continua en: Un poco de historia (Clase 54)
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestros teléfonos 4383-3843/4395, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!