Viene de: Los diferentes métodos de navegación (clase 6).
El inicio de la navegación comercial trajo acarreada la necesidad de una representación fidedigna de la superficie terrestre, tanto más importante cuanto mayores eran las relaciones y el comercio entre países distantes. Así fue como se gestó una verdadera revolución en todo lo concerniente a la confección de mapas y cartas náuticas.
La carta náutica, herramienta indispensable a bordo de cualquier embarcación, es la representación fiel de un determinado sector de la esfera terrestre sobre un plano de papel y contiene información de vital importancia para la seguridad de la navegación. Además de las coordenadas geográficas de los distintos sectores del planeta, las cartas náuticas brindan una enorme cantidad de información, de suma relevancia para el navegante:
- Declinación magnética del lugar.
- Tipo de fondo marino.
- Tipo de costa.
- Boyas, faros y señales.
- Profundidades.
- Peligros para le navegación.
- Accidentes geográficos.
- Puntos notables de la costa.
- Corrientes de marea.
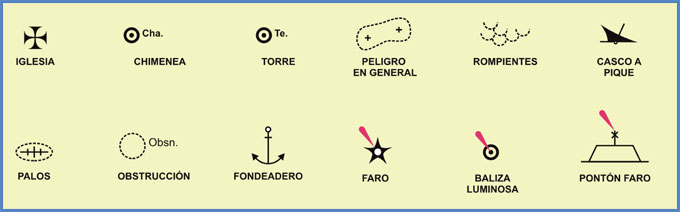
Dado que resultaría prácticamente imposible memorizar la gran cantidad de información que se encuentra contenida en las cartas náuticas, el Servicio de Hidrografía Naval edita una publicación que contiene toda la simbología utilizada en las mismas. Esta publicación es la “H-5000” y es de uso obligatorio a bordo. Un ejemplo de algunos de los símbolos más utilizados pueden verse en el siguiente esquema.
Las cartas náuticas pueden estar confeccionadas con diferentes escalas, en función de la relación que estas tengan con la verdadera magnitud del espacio que representan:
• Cartas de navegación oceánica: Son cartas que representan una gran porción de la superficie terrestre y se utilizan para la preparación y planificación de travesías oceánicas. La escala de dichas cartas pueden variar de 1:30.000.000 a 1:3.000.000.
• Cartas generales de navegación: Son utilizadas en navegaciones oceánicas extensas y van desde 1:3.000.000 hasta 1:200.000.
• Cartas de navegación costera: Se utilizan para realizar navegación costanera y cuentan con bastante información de puntos notables de la costa y probables peligros a la navegación. Van de 1:200.000 a 1:50.000.
• Cartas costeras particulares: Al igual que en el ítem anterior, se utilizan en navegación costera pero en zonas donde es preciso contar con mayor detalle (aproximación a puertos, accidentes geográficos de importancia, etc.). Van de 1:50.000 a 1:25.000.
• Cuarterones: Sirven para representar con gran detalle zonas muy pequeñas como puertos, radas, etc.
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!