Viene de: Los Sistemas de Posicionamiento (Clase 70)
El término “Radar” proviene del acrónimo inglés Radio Detection and Ranging (detección y medición de distancias por radio). Los dispositivos de Radar se utilizan fundamentalmente para medir distancias, direcciones y velocidades de cualquier objeto, tanto sea estático como móvil (barcos, aviones, vehículos terrestres, etc.).
El Radar basa su principio de funcionamiento en la medición del tiempo que tarda la emisión de un pulso de radio en rebotar en el objetivo y regresar nuevamente al emisor. Para ello se vale de dos sencillos fenómenos físicos: el Eco y el Efecto Doppler.
Eco: Del mismo modo que si fuese un sonido, una onda electromagnética que se propaga por el aire y choca contra un objeto hace que una parte de su energía sea absorbida y que otra parte rebote hacia la fuente emisora. El tiempo que tarda en regresar al emisor y las características de la señal reflejada sirven al radar para calcular la posición, distancia y velocidad del objeto detectado.
Efecto doppler: El efecto doppler consiste en la aparente variación de frecuencia de una onda cuando el emisor de la misma se encuentra en movimiento respecto de quien la recibe. Cuando el emisor de dicha onda electromagnética se mueve acercándose al receptor, la frecuencia de la onda recibida será mayor que la frecuencia emitida. Si por el contrario, la fuente de ondas se mueve en dirección contraria (alejándose) del receptor, la frecuencia recibida será proporcionalmente menor. El ejemplo característico es el del sonido del motor de un auto que cruza por delante de nosotros: Al aproximarse, el sonido se hace más agudo (aumenta la frecuencia); mientras que cuando se aleja, se hace más grave (disminuye la frecuencia).
Las ondas electromagnéticas normalmente viajan a través del espacio en línea recta y a velocidad constante, más precisamente a la velocidad de la luz (300.000 kilómetros por segundo). Dichas ondas se reflejan sobre superficies conductoras; por lo tanto, si las ondas reflejadas retornan al punto de emisión de las ondas, se puede establecer que han encontrado algún obstáculo en su trayectoria de propagación.
Principio de funcionamiento
La antena de radar emite una señal de radio, generada por un transmisor de alta potencia. Dicha señal choca contra un blanco u objeto, el cual la refleja y es captada por un receptor altamente sensible. La onda reflejada captada por la antena se denomina “eco”.
La figura 193 muestra el esquema de funcionamiento básico de un radar y sus partes componentes:
Transmisor: Es el encargado de generar los impulsos de radiofrecuencia de alta potencia para que la antena radie al espacio.
Duplexor: Su función es la de alternar la utilización de la antena entre el transmisor y el receptor, de modo que solo sea necesaria una única antena para el funcionamiento del sistema. Este switching es imprescindible para evitar que la alta potencia de los pulsos generados por el transmisor dañe a la unidad receptora.
Receptor: Demodula y amplifica las señales de radiofrecuencia captadas por la antena y las convierte en señales de video para enviar a la pantalla.
Antena: Tiene una doble función. Una de ellas es la de convertir la energía eléctrica generada por el transmisor en ondas electromagnéticas y luego radiarlas al espacio. La otra se vincula al proceso inverso, es decir a captar las ondas reflejadas (ecos) y enviarlas al receptor para luego ser presentadas en la pantalla.
Pantalla: Presenta al usuario una interfaz visual fácilmente comprensible de los 360o del horizonte y de la posición de los blancos detectados por el radar.
Si bien son muchas las utilidades que puede ofrecer un radar, las dos funciones primordiales con que cuenta son las siguientes:
Determinación de la distancia a un blanco: La distancia a un objeto cualquiera se establece utilizando como referencia el tiempo que tarda la señal de radiofrecuencia emitida en chocar contra el objeto y regresar al receptor. Dado que la velocidad a la que se desplaza la onda es conocida (velocidad de la luz), la distancia al objeto en cuestión es fácilmente deducible aplicando la fórmula:
D = Co x T/2
Donde:
• “D“ es la distancia al blanco a medir.
• “C0“ es la velocidad de la luz o constante de propagación.
• “T“ es el tiempo que tarda la señal en viajar desde el radar y regresar al receptor.
Debido a que la señal de radiofrecuencia viaja hasta el objeto y tiene que regresar, el tiempo medido es el doble que tarda en llegar al mismo. Por esa razón, el valor de “T” se divide por dos en la fórmula para que el cálculo sea correcto.
Determinación de la demora o marcación a un blanco: El radar puede determinar con máxima precisión el ángulo formado entre la dirección al objetivo y la línea proa-popa de la embarcación (Marcación), así como también permite establecer el ángulo formado entre la dirección al objeto y el punto cardinal Norte (Demora). En ambos casos utiliza la direccionalidad de la antena como referencia, es decir midiendo la dirección en la que la antena apunta cuando recibe el eco.
A los efectos de determinar la “Marcación”, el radar no necesita de información adicional, ya que solo se requiere medir el ángulo entre el objeto y la línea de crujía, habiendo establecido esta última al momento de la instalación de la antena.
Para establecer la “Demora”, en cambio, el radar requiere la información precisa del punto cardinal Norte. Para ello, los sistemas modernos llevan a cabo esta tarea por medio de una conexión externa (interfaz) a alguno de los sistemas GPS de la embarcación.
Operación del radar
La operación básica del radar resulta relativamente sencilla y no presenta demasiados inconvenientes. Describiremos a continuación algunos de los controles con los que cuenta un radar convencional (Fig. 194):
• encendido (Power): Tecla para encender/apagar el equipo. Dado que el sistema tarda en comenzar a estar operático, y debido a que el mayor consumo lo produce la antena giratoria, la mayoría de los radares cuenta con la función “Stand by” que permite mantener el radar encendido pero con la antena inmóvil, a fin de reducir el consumo eléctrico.
• Ganancia (Gain): Ajusta la sensibilidad del receptor a fin de que regular la intensidad de los ecos presentados en la pantalla. El mismo debe ser calibrado de modo tal de lograr que se vean los ecos de objetos reales en la pantalla con la debida nitidez, pero evitando ecos falsos y ruido producto de olas e interferencias. Un ajuste muy bajo provocará la pérdida de ecos reales, mientras que un ajuste excesivo producirá un enmascaramiento de los ecos verdaderos entre imágenes de rebotes no deseados. Los radares modernos cuentan con ajuste automático de ganancia.
• Brillo: regula la intensidad de iluminación de la pantalla.
• Contraste: El control de contraste actúa de modo similar al de un televisor o monitor convencional, atenuando o aumentando la diferencia entre blancos y negros.
• Sea Clutter: En condiciones de mar con olas de importancia, las mismas provocarán el rebote de las ondas de radio, generando ecos no deseados en la pantalla del radar. Para disminuir este efecto, el control “Sea Clutter” actúa atenuando la ganancia en las proximidades del buque en forma gradual (cuanto más cerca del buque, mayor será la atenuación). De esta forma se reducen los indeseados “retornos de mar”. Un ajuste excesivo de este control puede provocar la desaparición de ecos reales en las cercanías de la embarcación.
• rain Clutter: Este control permite reducir la sensibilidad del receptor en aquellas zonas donde detecta lluvias excesivas. Un exceso en el ajuste del mismo puede provocar, al igual que el caso anterior, pérdida de recepción de ecos reales.
• eBL – electronic Bearing Line (Línea de dirección electrónica) (Fig. 195): Esta función permite generar una línea desde el centro de la pantalla (posición del barco) hasta la periferia. Dicha línea puede ser movida barriendo la pantalla hacia la derecha o izquierda por medio del “control del cursor”. Deteniendo la línea en un eco determinado, se puede medir el ángulo formado entre dicho eco y la proa (marcación) o bien respecto del Norte (demora). El radar de la figura No 194 permite trazar dos EBL simultáneamente.
• VrM – Variable range Marker (Anillo de distancia Variable) (Fig. 196).: El VRM es un anillo circular, con centro en la posición del buque, cuyo diámetro puede ser ajustado por medio del “control del cursor”. Ampliando o disminuyendo el anillo hasta hacerlo coincidir con cualquier blanco en la pantalla, puede medirse la distancia al mismo. El modelo de la figura 194 permite abrir hasta dos anillos en forma simultánea.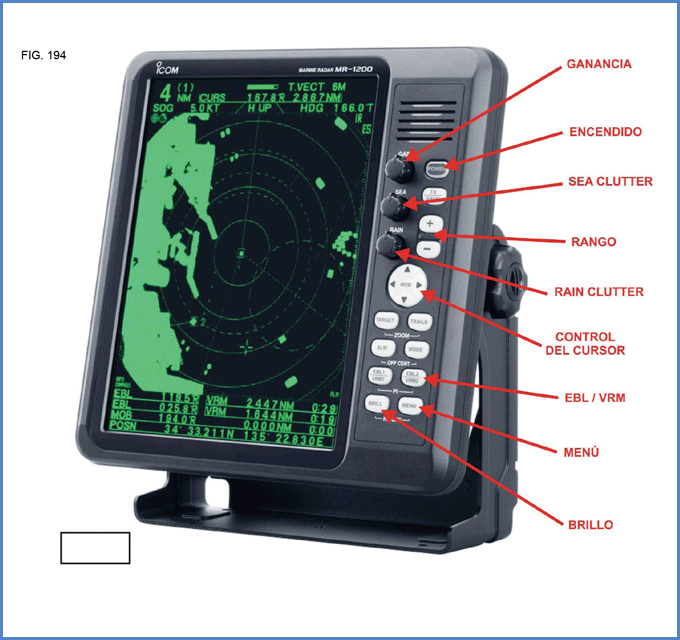


• rango: Los controles de rango permiten aumentar o disminuir la escala de la pantalla del radar, de manera tal de definir la distancia al anillo exterior de la misma. Los valores usuales son 0.25, 0.5, 0.75, 1.5, 3, 6, 12 y 24 millas náuticas.
La pantalla puede configurarse según dos presentaciones básicas que son “Proa Arriba” o “Norte Arriba”. Cuando se establece la configuración “Proa Arriba” la línea que sale del centro de la pantalla hacia arriba establece la dirección de la proa de la embarcación, y la misma permanece fija. De este modo, la presentación es la más real en cuanto a la posición que el barco adopta en relación al horizonte. Los objetos y las direcciones a los mismos estarán referidos a dicha línea (marcaciones).
Si el operador ha establecido el radar en modo “Norte Arriba”, la pantalla se orientará con el punto cardinal Norte en la parte superior. La línea proa-popa ya no permanece fija sino que se moverá siguiendo los cambios de rumbo del buque, y las direcciones a los ecos estarán referenciadas respecto del Norte (demoras).
Existe una tercera configuración denominada “Rumbo Arriba”, que como su nombre lo indica, presenta la línea del rumbo verdadero en la parte superior, aunque no es muy utilizada.
Los radares modernos permiten una amplísima variedad de funciones adicionales no tratadas en este volumen por cuestiones de espacio. Los de última generación permiten incluso superponer imágenes de radar con las cartas vectoriales de la zona en pantallas LCD a todo color.
Continúa en: El Sistema AIS (Automatic Identification System) (Clase 72)
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!
