Viene de La navegación costera: Linea de posición (Clase 44)
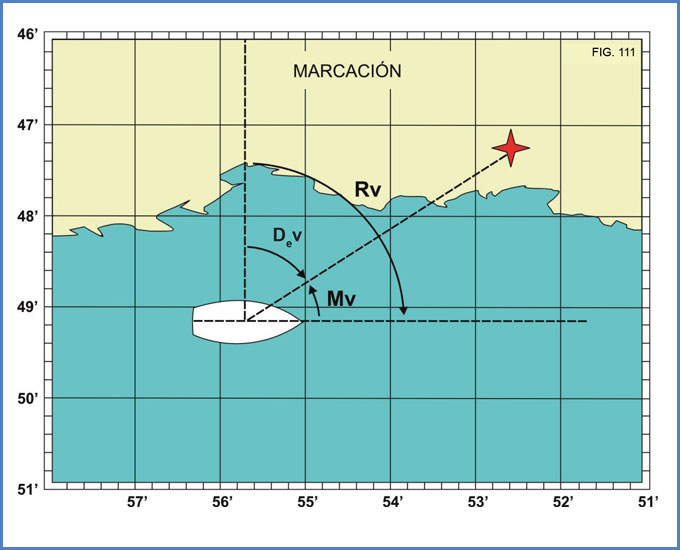
Una cosa importante a tener en cuenta es que el valor de la demora a un punto no depende del rumbo que lleva la embarcación en ese momento, ya que este no interviene en la medición; mientras que la marcación sí depende del rumbo.
En el esquema de la figura No 111 puede verse claramente cómo, si la embarcación variara su rumbo 10o a estribor, la marcación aumentaría 10o mientras que la demora seguiría siendo la misma.
En definitiva, y debido a estas complejidades, como líneas de posición son más útiles las demoras; mientras que las marcaciones suelen usarse con otros fines que el de obtener una línea de posición, como por ejemplo determinar si existe rumbo de colisión con otras embarcaciones.
• Enfilación: Se habla de enfilaciones cuando dos puntos notables se encuentran alineados entre sí y respecto del observador (Fig. 112). La ventaja fundamental que presentan las enfilaciones es que no se requiere de instrumento alguno para su utilización, y solo es preciso para situarse con ellas el trazarlas en la carta. A su vez, tampoco requieren de cálculos adicionales.
La desventaja fundamental es que no pueden utilizarse en todo momento como las demoras ya solo se cuenta con algunas pocas.

Las enfilaciones son, junto con las demoras, líneas de posición de suma utilidad para situarse a vista de costa, además que suelen ser una extraordinaria ayuda a la navegación para iniciar ingresos a puerto o recalar en dársenas o puertos.
Los datos de las enfilaciones en cada caso suelen encontrarse publicados en los derroteros editados por los Servicios de Hidrografía de cada país.
• Isobata: Las isobatas son líneas que unen puntos de igual sondaje y pueden ser utilizadas como una línea de posición, si puede determinarse con precisión su ubicación en la carta (Fig. 113). Es ideal su uso cuando se atraviesa algún canal y se puede medir con claridad una variación abrupta del sondaje.
• Ángulos horizontales: El concepto de la obtención de una línea de posición mediante esta técnica implica medir el ángulo formado entre dos puntos notables, vistos desde la posición del observador. Para la obtención de una línea de posición por ángulos horizontales es preciso recurrir a un instrumento conocido como sextante (tema que trataremos más adelante), y que permite medir ángulos con altísima precisión.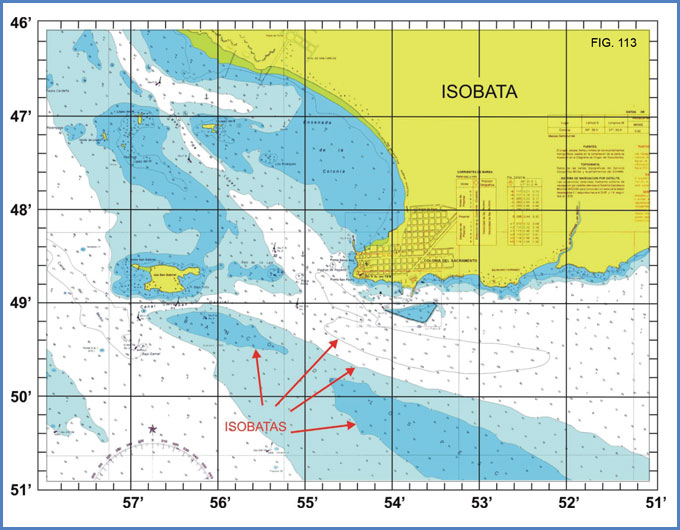
Una vez medido el ángulo horizontal entre dos puntos notables, la línea de posición resultante será un arco de circunferencia que contiene a dichos puntos notables y a la posición del observador, denominado “arco capaz”. El arco de circunferencia representará una sucesión de puntos probables, desde los cuales el observador verá a ambos puntos notables con igual ángulo (Fig. 114).
En la figura puede verse claramente como los barcos 1 y 2, situados en la misma circunferencia, verán a ambos puntos notables con el mismo ángulo (a1 = a2).
IMAGEN
El método para el cálculo y trazado del “arco capaz” es sumamente sencillo. Tomaremos como ejemplo el caso de haber medido un ángulo horizontal entre dos faros de 60o (Fig. 115).
1) Se traza el segmento que une a ambos puntos notables. 2) Se resta a 90o el ángulo medido (90o – 60o = 30o)
3) Desde cada punto notable se trazan sendas líneas que guarden, con el segmento que une ambos faros, un ángulo igual al calculado anteriormente (30o). 4) En la intersección entre ambas rectas se hace centro con el compás y se dibuja un arco que una a ambos puntos notables. Dicho arco será el “arco capaz” que contiene la posición del observador o, mejor dicho, la posición de todos los observadores que verán ambos faros con igual ángulo horizontal.
En caso de que al restar a 90o el ángulo medido, el valor resultante fuese negativo, el procedimiento será idéntico pero trazando las líneas hacia la costa. En este caso concreto, el centro de la circunferencia quedará sobre tierra pero, como es obvio, la circunferencia (arco capaz) se trazará sobre el mar. Tomemos como ejemplo el haber medido un ángulo horizontal de 115o (Fig. 116).
90o – 115o = – 25o
Como veremos más adelante, una línea de posición aislada no permite obtener un punto FIX, y será necesaria la combinación de dos o más de ellas para determinar una posición cierta. En el caso del método de ángulos horizontales o arco capaz, puede lograrse la determinación de un FIX midiendo dos ángulos simultáneamente,
para lo cual será necesario contar con 3 puntos notables. Para comprender esto con mayor claridad supongamos a un observador que logra obtener dos ángulos horizontales: el ángulo “AB” de 70o y el ángulo “BC” de 50o (Fig. 117).
Para determinar la situación por dos ángulos horizontales simultáneos, simplemente se resuelven de manera separada los dos ángulos medidos. Donde se intersectan los arcos capaces resultantes, obtendremos el punto FIX.
AB = 70o (90o – 70o = 20o) BC = 50o (90o – 50o = 40o)
Otro modo interesante de resolver la situación por dos ángulos horizontales es la siguiente (Fig. 118):
1) Se unen con sendas líneas los puntos notables A-B y B-C, tal como hicimos en el punto anterior. 2) Se calculan la diferencia angular entre los ángulos medidos y su complemento, del mismo modo que lo hicimos anteriormente (A-B = 20o y B-C = 40o) 3) Desde “B” se traza el ángulo resultante de A-B.
4) Desde “A” se traza una perpendicular a la recta A-B y se coloca el punto AB’ donde esta intersecta a la anterior. 5) Desde “B” se traza el ángulo resultante de B-C.
6) Desde “C” se traza una perpendicular a la recta B-C y se coloca el punto BC’ donde esta intersecta a la anterior. 7) Se unen los puntos AB’ y BC’ con una recta.
8) Se traza una perpendicular a esta última recta AB’ – BC’ que pase por el punto notable “B”.
9) La intersección entre ambas rectas (la perpendicular y la recta AB’ – BC’) determinará el punto FIX.
Como puede comprobarse comparando ambos gráficos, se ha arribado por ambos métodos a idéntico resultado. En este último procedimiento, para resolver el “arco capaz”, paradójicamente se ha prescindido de compás y no fue necesario trazar arco alguno.
El procedimiento para determinar la situación en el mar por “arco capaz” es sumamente exacto, más aún que la situación por dos demoras, debido a la precisión que posee el sextante marino en la medición de ángulos.
• Distancias: Las líneas de posición por distancias son curvas que unen puntos de igual distancia con el punto notable de la
costa. Este tipo de líneas de posición es más complejo de utilizar ya que se requiere de obtener la distancia al punto en cuestión, para lo que se hace preciso contar con determinados instrumentos como el radar. De no contar con esa posibilidad, varios son los procedimientos que permiten determinar la distancia a la cual nos encontramos de un determinado faro, conociendo su altura real sobre el nivel del mar y midiendo la altura angular que existe entre el tope y la base del mismo. El instrumento más común para llevar a cabo esto último es el sextante, aunque existen también otras posibilidades.
El caso más simple se da cuando la proximidad al faro permite que el mismo sea visible en su totalidad, es decir que la curvatura terrestre permite ver tanto el tope como la base del mismo. Puede darse también el caso de que el faro en cuestión se encuentre un tanto más alejado y ya no sea
visible el pie de dicho faro, producto de la mencionada curvatura de la Tierra. Aquí ya no será posible medir la altura entre tope y base.
El procedimiento a seguir será diferente en ambos casos pero será menester, en primer término, determinar si el faro elegido se encuentra dentro o fuera del horizonte. Por esa razón, se hace imprescindible en principio conocer con precisión la distancia al horizonte marino.
Continua en: La Distancia al Horizonte (Clase 46)
Darío G. Fernández
Director del ISNDF
Si desea realizar el curso de patrón de yate completo en nuestro instituto, puede contactarse con nosotros a través de nuestro teléfono Cel. (011) 15 5644-2888, o bien vía mail a secretaria@isndf.com.ar
Aprenda a navegar con nosotros, lo llevaremos a buen puerto!